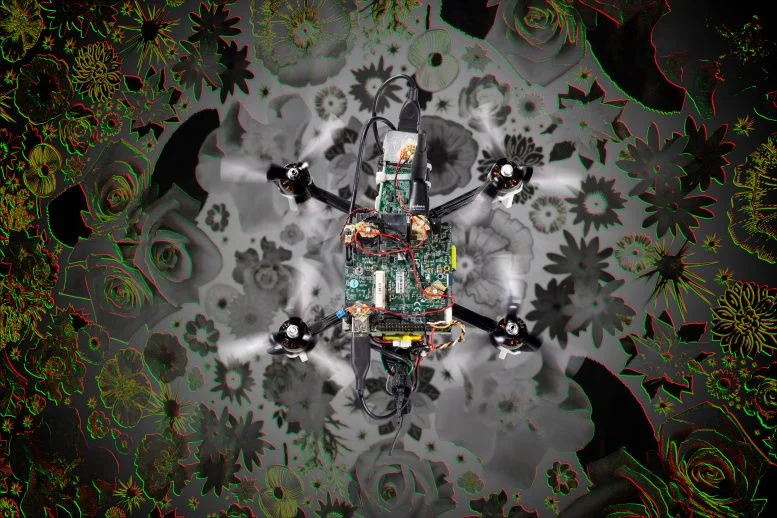
Дослідники з Делфтського технологічного університету створили дрон, який може літати автономно, використовуючи нейроморфну обробку зображень і керування, натхненне функціонуванням мозку тварин. Мозок тварин обробляє дані та споживає енергію ефективніше, ніж глибокі нейронні мережі, які зазвичай працюють на графічних процесорах. Отже, нейроморфні процесори ідеально підходять для невеликих дронів, оскільки вони усувають потребу в громіздкому апаратному забезпеченні та великих батареях.
Результати надзвичайні: під час польоту глибока нейронна мережа дрона обробляє дані в 64 рази швидше і споживає втричі менше енергії, ніж під час роботи на GPU. Подальший розвиток цієї технології може дозволити безпілотникам стати такими ж маленькими, спритними та розумними, як літаючі комахи чи птахи. Висновки нещодавно були опубліковані в Science Robotics.
Навчання у мізків тварин: розширені нейронні мережі
Штучний інтелект має великий потенціал для забезпечення автономних роботів інтелектом, необхідним для реальних додатків. Однак сучасний штучний інтелект спирається на глибокі нейронні мережі, які вимагають значної обчислювальної потужності. Процесори, створені для роботи глибоких нейронних мереж (графічні процесори, графічні процесори), споживають значну кількість енергії. Особливо для маленьких роботів, таких як літаючі безпілотники, це проблема, оскільки вони можуть мати дуже обмежені ресурси з погляду зондування та обчислень.
Мозок тварин обробляє інформацію способом, який сильно відрізняється від нейронних мереж, що працюють на графічних процесорах. Біологічні нейрони обробляють інформацію асинхронно та здебільшого спілкуються за допомогою електричних імпульсів, які називаються спайками . Оскільки надсилання таких сплесків вимагає енергії, мозок мінімізує сплески, що призводить до рідкісної обробки.
Натхненні цими властивостями мозку тварин вчені та технологічні компанії розробляють нові нейроморфні процесори. Ці нові процесори дозволяють запускати імпульсні нейронні мережі та обіцяють бути набагато швидшими та енергоефективнішими.
«Обчислення, які виконуються за допомогою нейронних мереж зі спайками, набагато простіші, ніж у стандартних глибоких нейронних мережах, — каже Джессі Хагенаарс, доктор філософії та один із авторів статті. — У той час, як нейронам цифрову спайку потрібно лише додавати цілі числа, стандартним нейронам потрібно множити і складати числа з плаваючою комою. Це робить нейронні мережі швидшими та енергоефективнішими. Щоб зрозуміти чому, подумайте, що людям також набагато легше обчислити 5 + 8, ніж обчислити 6,25×3,45 + 4,05×3,45».
Ця енергоефективність ще більше підвищується, якщо нейроморфні процесори використовуються в поєднанні з нейроморфними датчиками, такими як нейроморфні камери. Такі камери не створюють зображення через фіксований інтервал часу. Натомість кожен піксель надсилає сигнал лише тоді, коли стає яскравішим або темнішим. Перевагами таких камер є те, що вони набагато швидше сприймають рух, є більш енергоефективними та добре працюють як у темному, так і в яскравому середовищі. Крім того, сигнали від нейроморфних камер можуть надходити безпосередньо в імпульсні нейронні мережі, що працюють на нейроморфних процесорах. Разом вони можуть сформувати величезний інструмент для автономних роботів, особливо маленьких, спритних роботів, таких як літаючі дрони.
Перше нейроморфне бачення та керування літаючим дроном
У статті, опублікованій в Science Robotics, дослідники з Делфтського технологічного університету, Нідерланди, вперше демонструють дрон, який використовує нейроморфне бачення та керування для автономного польоту. Зокрема, вони розробили імпульсну нейронну мережу, яка обробляє сигнали від нейроморфної камери та видає команди керування, які визначають позу та тягу дрона. Вони розгорнули цю мережу на нейроморфному процесорі, нейроморфному дослідницькому чіпі Intel Loihi, на борту дрона. Завдяки мережі дрон може сприймати і контролювати власний рух у всіх напрямках.
«Ми зіткнулися з багатьма проблемами, — говорить Федеріко Паредес-Вальєс, один із дослідників, які працювали над дослідженням, — але найважчим було уявити, як ми можемо навчити імпульсну нейронну мережу, щоб навчання було достатньо швидким і навченим. мережа добре функціонуватиме на справжньому роботі. У підсумку ми розробили мережу, що складається з двох модулів. Перший модуль вчиться візуально сприймати рух за сигналами рухомої нейроморфної камери. Він робить це повністю сам, у спосіб самоконтролю, спираючись лише на дані з камери. Це схоже на те, як тварини вчаться сприймати світ самостійно. Другий модуль навчається відображати розрахунковий рух на команди керування в симуляторі. Це навчання ґрунтувалося на штучній еволюції симуляції, у якій мережі, які краще керували дроном, мали вищі шанси на створення потомства. Протягом багатьох поколінь штучної еволюції імпульсні нейронні мережі ставали дедалі кращими в керуванні й нарешті змогли літати в будь-якому напрямку з різною швидкістю. Ми навчили обидва модулі та розробили спосіб їх об’єднання. Ми були раді бачити, що об’єднана мережа одразу добре спрацювала на справжньому роботі».
Завдяки нейроморфному зору та контролю дрон здатний літати з різною швидкістю в різних умовах освітлення, від темного до яскравого. Він навіть може літати з мерехтливими вогнями, які змушують пікселі нейроморфної камери надсилати в мережу велику кількість сигналів, які не пов’язані з рухом.
Покращена енергоефективність і швидкість завдяки нейроморфному ШІ
«Важливо те, що наші вимірювання підтверджують потенціал нейроморфного ШІ. Мережа запускається в середньому від 274 до 1600 разів на секунду. Якщо ми запускаємо ту саму мережу на невеликому вбудованому графічному процесорі, вона запускається в середньому лише 25 разів на секунду, різниця приблизно в 10-64 рази! Крім того, під час роботи в мережі нейроморфний дослідницький чіп Intel Loihi споживає 1,007 Вт, з яких 1 Вт — це енергія простою, яку витрачає процесор саме при включенні чіпа. Сама робота мережі коштує лише 7 міліват. Для порівняння, під час роботи тієї самої мережі вбудований графічний процесор споживає 3 Вт, з яких 1 Вт — це енергія в режимі очікування, а 2 Вт витрачається на роботу мережі. Нейроморфний підхід призводить до того, що штучний інтелект працює швидше та ефективніше, що дозволяє розгортати його на значно менших автономних роботах», – говорить Стейн Штрообантс, доктор філософії в галузі нейроморфних дронів.
Майбутнє застосування нейроморфного ШІ для крихітних роботів
«Нейроморфний штучний інтелект дозволить усім автономним роботам стати більш інтелектуальними, — говорить Гвідо де Крун, професор із біологічних дронів, — але це абсолютний стимул для крихітних автономних роботів. На факультеті аерокосмічної інженерії Делфтського технологічного університету ми працюємо над крихітними автономними безпілотними літальними апаратами, які можна використовувати для різноманітних завдань — від моніторингу врожаю в теплицях до відстеження запасів на складах. Переваги крихітних безпілотників полягають у тому, що вони дуже безпечні та можуть орієнтуватися у вузьких середовищах, наприклад, між грядками томатів. Крім того, вони можуть бути дуже дешевими, так що їх можна розгортати роями. Це корисно для більш швидкого покриття території, як ми показали в налаштуваннях розвідки та локалізації джерела газу».
«Поточна робота є великим кроком у цьому напрямку. Однак реалізація цих програм залежатиме від подальшого зменшення нейроморфного обладнання та розширення можливостей для більш складних завдань, таких як навігація».




Comments